Do kategorii elementów stykowych zaliczamy wszystkie elektromechaniczne podzespoły, wykorzystywane w elektronice i elektrotechnice, których zadaniem jest załączanie lub przełączanie napięć zasilania bądź sygnałów (sterujących albo też pomiarowych). W zależności od zastosowania używamy przeróżnych typów przełączników, włączników czy też przekaźników. Najważniejsze parametry tych elementów i najczęściej spotykane problemy – wraz z metodami ich rozwiązywania w praktyce, czyli w tworzonych przez elektroników projektach urządzeń – opisaliśmy w tym artykule.

Rodzaje elementów stykowych – przełączniki
Najczęściej wykorzystywanym rodzajem elementów stykowych są wszelkiego typu przełączniki mechaniczne, zawierające przynajmniej dwa styki i prosty układ mechaniczny. Jego zadaniem jest przenoszenie na układ styków siły, wywieranej przez użytkownika. Jeden ze styków pozostaje najczęściej nieruchomy, zamocowany na stałe w obudowie, a drugi przyjmuje postać sprężystej blaszki, która (dociśnięta do styku nieruchomego) zwiera obwód, a po zwolnieniu działającej siły – rozłącza styki, przerywając obwód. Takie rozwiązanie pozwala na maksymalne uproszczenie konstrukcji elementu stykowego.
Najpopularniejsze przełączniki oferowane są jako:
- przyciski – aby rozewrzeć lub zewrzeć obwód, należy nacisnąć specjalny popychacz;
- przełączniki przesuwne – zwarcie lub rozwarcie styków następuje po liniowym przesunięciu niewielkiej dźwigni;
- przełączniki typu rocker – zwane inaczej kołyskowymi; przełączanie pomiędzy poszczególnymi pozycjami następuje po naciśnięciu jednej z dwóch stron zakrzywionej płytki opisanej najczęściej symbolami „0” i „1” (w przypadku prostych przełączników dwupozycyjnych) bądź „I”, „0” i „II” (w przypadku przełączników trójpozycyjnych);
- przełączniki z dźwignią – przełączenie styków następuje po przesunięciu dźwigni (w rzeczywistości po jej obróceniu o niewielki kąt);
- przełączniki obrotowe – chętnie stosowane m.in. w multimetrach i niektórych innych urządzeniach pomiarowych oraz w starszym sprzęcie audio, np. do wyboru kanału wejściowego wzmacniacza; w tego typu przełącznikach kilka styków jest umieszczonych nieruchomo na obwodzie obudowy, a środkowy styk, połączony z obrotową dźwignią, może łączyć się z dowolnym ze styków wybieralnych, w zależności od kątowego położenia osi przełącznika;
- joysticki – chętnie stosowane m.in. w starszego typu telefonach komórkowych; joystick składa się najczęściej z pięciu miniaturowych przycisków ułożonych w taki sposób, że naciśnięcie ruchomej dźwigni w jednym z czterech kierunków (góra, dół, prawo, lewo) powoduje zwarcie jednego ze styków kierunkowych ze stykiem głównym, a dodatkowy, piąty przycisk, służy do wykrywania wciśnięcia dźwigni w kierunku osi joysticka (ten właśnie styk jest używany do zatwierdzania funkcji wybieranych przez użytkownika, odgrywa zatem rolę pewnego rodzaju „klawisza Enter”). Warto odróżnić proste joysticki z przełącznikami od nieco bardziej rozbudowanych elementów umożliwiających odczyt dokładnej pozycji dzięki wbudowanym potencjometrom.
Niektóre, szczególne odmiany przełączników są na tyle popularne w elektronice, że zyskały swoją własną, charakterystyczną nazwę. Przykładem mogą być:
- przełączniki dip-switch, zwane też tablicowymi – są to zestawy kilku (najczęściej 2 -10) miniaturowych przełączników suwakowych (przesuwnych), umieszczonych równolegle w jednej obudowie, z wyprowadzeniami do lutowania bezpośrednio na płytce drukowanej. Takie elementy są najchętniej używane do sprzętowej konfiguracji urządzeń, np. zakresu pomiarowego przemysłowych przetworników temperatury czy też adresu komunikacyjnego sterowników i urządzeń wykonawczych;
- przyciski tact-switch (zwane też mikroprzyciskami bądź z języka angielskiego: micro-switch lub uSwitch) – małe przyciski, montowane bezpośrednio na płytce drukowanej, spotykane w wariantach do montażu przewlekanego (THT) bądź powierzchniowego (SMD). Mają jedną lub dwie pary końcówek lutowniczych i występują praktycznie tylko w postaci pojedynczej pary styków zwiernych.
Podział elementów stykowych z uwagi na sposób działania i konfiguracje styków
Przełączniki można podzielić nie tylko z uwagi na mechaniczny sposób obsługi, ale także ze względu na konfigurację i liczbę styków oraz liczbę tzw. pozycji stabilnych. Do opisu konfiguracji styków używamy skrótów, pochodzących z języka angielskiego. Poszczególne pary styków możemy określić mianem:
- NO (ang. normally open) – styki normalnie otwarte, czyli zwierane dopiero po zadziałaniu siłą przez użytkownika;
- NC (ang. normally closed) – styki normalnie zwarte, czyli rozwierane dopiero po zadziałaniu siłą przez użytkownika.
Styki mogą tworzyć jedną parę zwierno-rozwierną, istnieje jednak także konfiguracja w postaci zestawu trzech styków: jeden stanowi styk wspólny i może on być łączony z jednym bądź drugim stykiem przełącznym. Przykładowo, popularne, trzykońcówkowe przełączniki dźwigienkowe lub kołyskowe, mają środkowy styk wspólny i – w zależności od położenia dźwigni – może on być połączony z jednym ze styków skrajnych. Mamy tu zatem do czynienia z dwiema parami styków: NO + NC.
Konfiguracje styków określa się czteroliterowym skrótem:
- SPST – przełącznik z jedną parą styków;
- SPDT – przełącznik z jednym stykiem wspólnym i dwoma wybieralnymi (zwany także dwubiegunowym pojedynczym);
- DPST – przełącznik składający się z dwóch sterowanych jednocześnie, ale niepołączonych galwanicznie par SPST;
- DPDT – przełącznik tworzący złożenie dwóch sterowanych jednocześnie, ale niepołączonych galwanicznie przełączników SPDT (zwany także dwubiegunowym podwójnym).
Przełączniki możemy także podzielić ze względu na liczbę pozycji stabilnych. Jeżeli dany przycisk zwiera (lub rozwiera) styki tylko podczas działania siły (np. po naciśnięciu popychacza palcem), to określamy taki element jako monostabilny (chwilowy). Ustanie działania siły powoduje natychmiastowy, samoczynny powrót do stanu stabilnego. Przełączniki bistabilne pozostają w zadanej pozycji po ustaniu działania siły: tak działa zdecydowana większość przełączników dźwigienkowych, rocker oraz suwakowych. Aby przełączyć z powrotem do pozycji poprzedniej, należy znów zadziałać siłą na popychacz lub dźwignię.
Inne rodzaje elementów stykowych
Warto dodać, że w praktyce wykorzystywane są także inne rodzaje elementów stykowych, sterowanych przez użytkownika. Popularne „pokrętła cyfrowe”, zwane enkoderami (chętnie wykorzystywane m.in. do sterowania drukarek 3D) mają dwie pary styków zwieranych i rozwieranych podczas obrotu pokrętła w specjalnej kolejności, zależnej od kierunku obrotów. Odpowiedni układ elektroniczny (lub program, w przypadku mikrokontrolera) jest w stanie wychwycić różnicę fazy pomiędzy obydwoma sygnałami i określić kierunek obrotów oraz kąt, o jaki obróciło się pokrętło.
W układach automatyki chętnie stosowane są także przełączniki krańcowe. Są to przyciski (w 99% przypadków monostabilne), których dźwignia lub popychacz są uruchamiane przez element układu mechanicznego (np. ramienia robota). „Krańcówki” okazują się niezbędne w wielu urządzeniach, gdyż nie tylko zabezpieczają przed uszkodzeniem (pozwalają zatrzymać napęd, gdy poruszany element znajdzie się na końcu bezpiecznego zakresu ruchu), ale także umożliwiają sterownikowi mechanizmu „zorientowanie się”, gdzie znajduje się poruszana część urządzenia.
Elementy stykowe i przekaźniki znajdziesz w ofercie sklepu Botland.
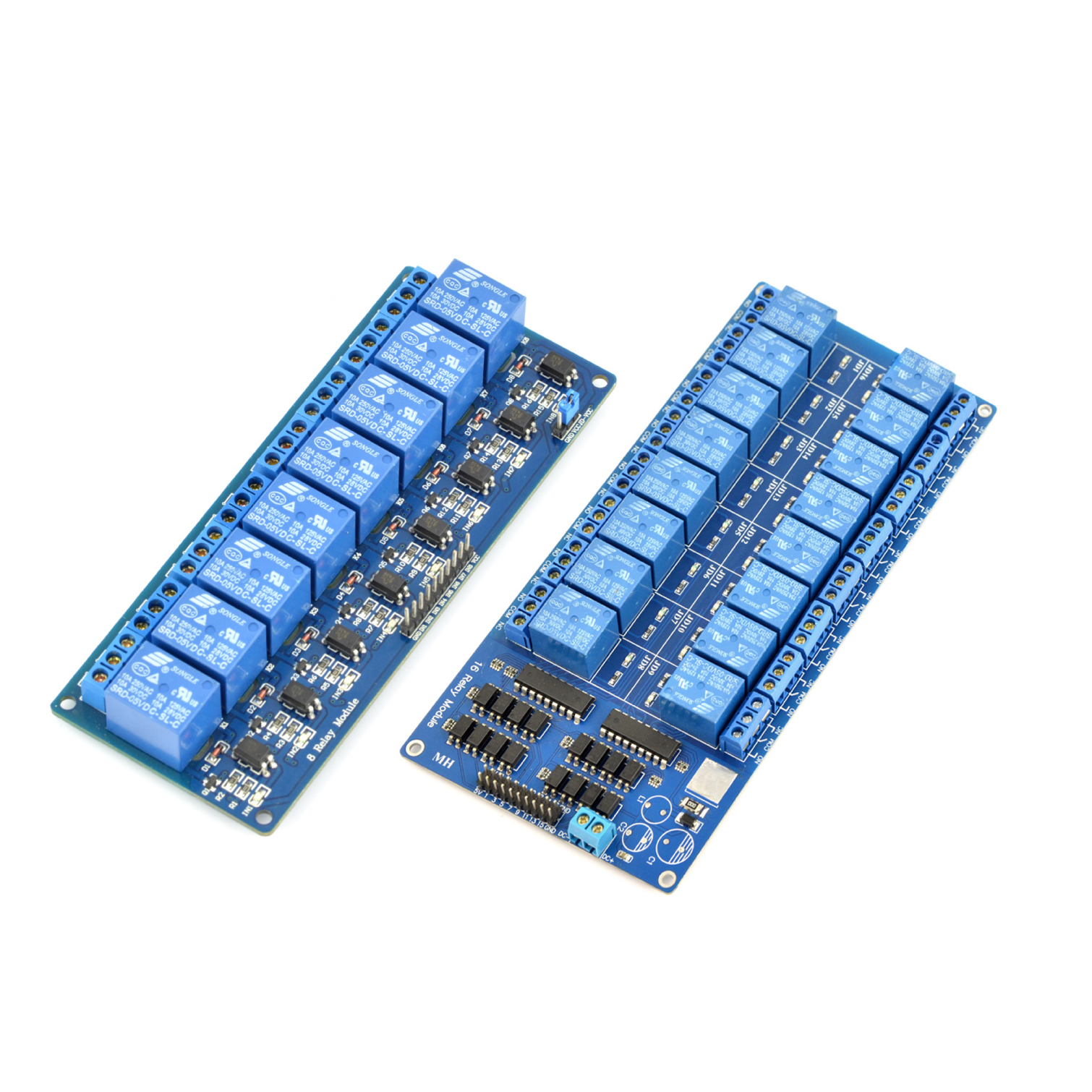
Przekaźniki elektromagnetyczne
Ostatnią grupą podstawowych elementów elektromechanicznych, którą powinniśmy omówić w niniejszym artykule, są przekaźniki elektromagnetyczne. Stanowią one specjalny rodzaj przełączników sterowanych nie siłą wywieraną przez użytkownika, ale… polem magnetycznym, generowanym przez cewkę. Dzięki takiemu rozwiązaniu dowolny układ elektroniczny może bezpiecznie sterować dużymi obciążeniami, także tymi zasilanymi bezpośrednio z sieci energetycznej. Większość przekaźników zawiera styki chwilowe (monostabilne), zatem po ustaniu przepływu prądu przez cewkę, styki powracają do położenia stabilnego. Niektóre przekaźniki mają natomiast działanie bistabilne, tj. potrafią utrzymywać zadaną pozycję dowolnie długo – są one jednak stosowane niepomiernie rzadziej, niż zwykłe elementy ze stykami monostabilnymi.
Warto pamiętać, że przekaźniki są produkowane w wielu wersjach, różniących się podstawowymi parametrami, tj.:
- liczbą i konfiguracją styków,
- maksymalnym napięciem styków,
- maksymalnym obciążeniem prądowym styków,
- napięciem i prądem zasilania cewki.
W praktyce elektronicznej najczęściej używa się przekaźników przygotowanych do zasilania cewki napięciem stałym (DC), jednak niektóre mogą pracować także z napięciem przemiennym. W układach wykorzystywane są prawie wyłącznie przekaźniki z cewką stałonapięciową – oczywiście rodzaj napięcia (prądu) przełączanego przez styki nie ma żadnego znaczenia dla działania przekaźnika (o ile zachowane zostaną określone przez producenta maksymalne wartości napięcia i prądu, które dla zasilania DC i AC różnią się i są podane na obudowie przekaźnika).
Sterowanie cewką przekaźnika
Do sterowania cewkami przekaźników elektromagnetycznych stosujemy najczęściej tranzystory bipolarne lub mosfet małej mocy. Ważne jest, aby maksymalny prąd kolektora (lub drenu) był wyższy, niż prąd wymagany do zasilania cewki. Aby uniknąć wysokonapięciowego przebicia, które miałoby miejsce w momencie wyłączenia prądu zasilania cewki (wynikającego z efektu samoindukcji), należy zawsze pamiętać o włączeniu równolegle do cewki diody (najlepiej Schottky’ego) w kierunku zaporowym względem polaryzacji napięcia zasilania. W ten sposób można łatwo i niezawodnie zabezpieczyć strukturę tranzystora przed uszkodzeniem powodowanym przez „wyładowanie” cewki. Maksymalny prąd przewodzenia diody powinien być wyższy, niż prąd zasilania cewki, a maksymalne napięcie wsteczne powinno przekraczać wartość napięcia zasilania.
Podsumowanie
Elementy stykowe – takie, jak przełączniki mechaniczne i przekaźniki – należą do najczęściej stosowanych elementów elektronicznych. Choć ich konstrukcja jest stosunkowo prosta, warto pamiętać o właściwym doborze tych elementów w zależności od aplikacji. Parametry, takie jak maksymalne napięcie styków, maksymalne obciążenie (stało- lub zmiennoprądowe) czy też parametry cewki przekaźnika elektromagnetycznego, powinny gwarantować zawsze pewien zapas, zwany marginesem bezpieczeństwa. Tylko wtedy elementy stykowe będą mogły przez długi czas pełnić swoją funkcję poprawnie, bez ryzyka przedwczesnej awarii.